
倒車?yán)走_(dá)系統(tǒng)又稱駐車輔助系統(tǒng)。在倒車過程中,如果在車輛要經(jīng)過的路徑上有障礙物,則停車距離控制系統(tǒng)會(huì)向駕駛員發(fā)出警告。
倒車?yán)走_(dá)系統(tǒng)由倒車?yán)走_(dá)ECU、倒車?yán)走_(dá)蜂鳴器及數(shù)個(gè)(通常為4個(gè))安裝在(后)保險(xiǎn)杠上的倒車?yán)走_(dá)傳感器等組成。如果安裝后攝像頭,則會(huì)在導(dǎo)航屏上提供車輛后部區(qū)域的圖像。
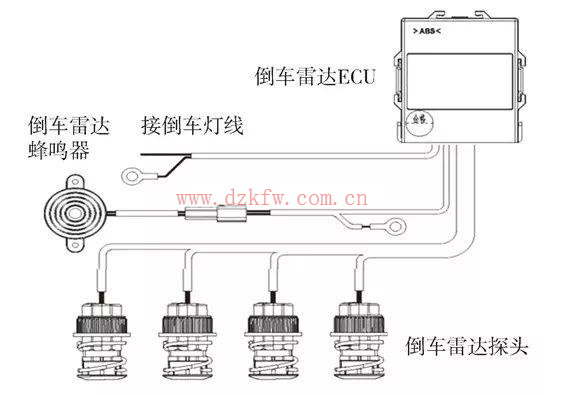
倒車?yán)走_(dá)蜂鳴器通常安裝在儀表板橫梁的上部,靠近駕駛員側(cè),由螺栓固定。有的則是安裝在組合儀表內(nèi)部,或者說是由儀表內(nèi)部的報(bào)警蜂鳴器完成這一功能。
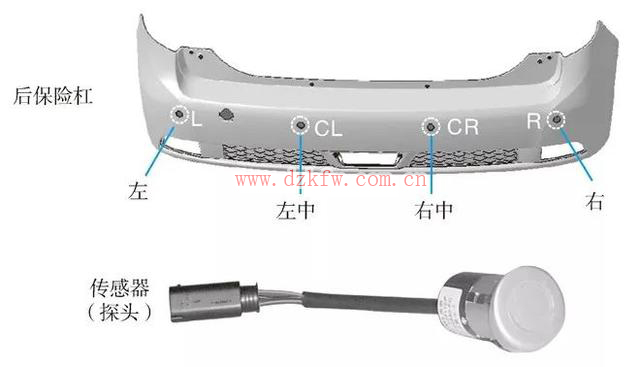
倒車?yán)走_(dá)傳感器俗稱探頭,安裝在后保險(xiǎn)杠上,包括左、左中、右中、右傳感器,由外向內(nèi)嵌入式安裝,如下圖所示。各傳感器的安裝位置都有規(guī)定,不能裝錯(cuò),否則可能引起誤報(bào)警。
工作原理
倒車?yán)走_(dá)系統(tǒng)就是利用超聲波信號(hào),經(jīng)倒車?yán)走_(dá)主機(jī)內(nèi)微電腦的控制,再從探頭的發(fā)射與接收信號(hào)過程中,比對(duì)信號(hào)折返時(shí)間而計(jì)算出障礙物距離,然后由報(bào)警器發(fā)出不同的報(bào)警聲。與障礙物的距離=發(fā)收時(shí)間差× 聲速/2。
當(dāng)車輛掛到倒車擋時(shí),倒車?yán)走_(dá)ECU使用超聲波傳感器監(jiān)控后保險(xiǎn)桿周圍的區(qū)域,如果監(jiān)控區(qū)域內(nèi)檢測(cè)到物體,儀表組件內(nèi)的聲音報(bào)警裝置就會(huì)發(fā)出聲音警告。系統(tǒng)能夠探測(cè)到比較堅(jiān)硬的固體障礙物同時(shí)也能探測(cè)到鐵絲網(wǎng)和柵欄之類的物體。
側(cè)面兩個(gè)傳感器的檢測(cè)范圍是距離保險(xiǎn)杠拐角處60cm 的區(qū)域。
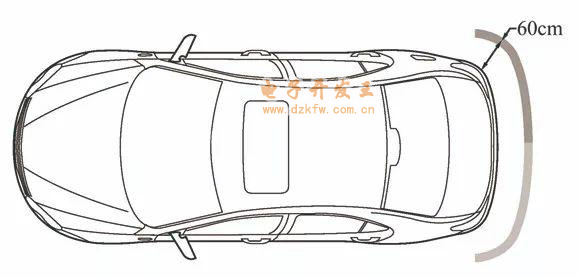
當(dāng)障礙物接近某個(gè)后側(cè)部區(qū)域時(shí),從車輛側(cè)后方150cm 開始可能給予指示,如下圖所示。
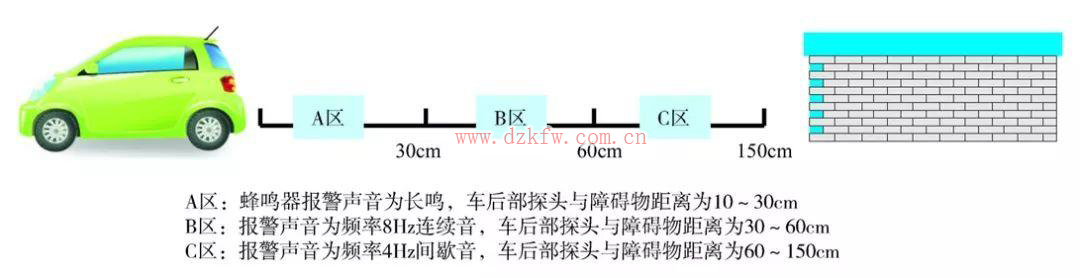
當(dāng)探測(cè)到的距離在側(cè)部小于20cm,或在中部正后方小于30cm時(shí),聲響信號(hào)將變?yōu)槌掷m(xù)音以避免碰撞保險(xiǎn)杠。
倒車?yán)走_(dá)系統(tǒng)電路示例
如下圖所示,點(diǎn)火開關(guān)處于ON/START位置時(shí),電流通過車身熔絲盒中熔絲F1,到倒車燈開關(guān)端子2。當(dāng)變速器操縱機(jī)構(gòu)處于倒擋位置時(shí),電流從倒車燈開關(guān)端子1 輸出,到倒車?yán)走_(dá)控制器端子1,為倒車?yán)走_(dá)控制器提供電源。
倒車?yán)走_(dá)系統(tǒng)電路 ▼
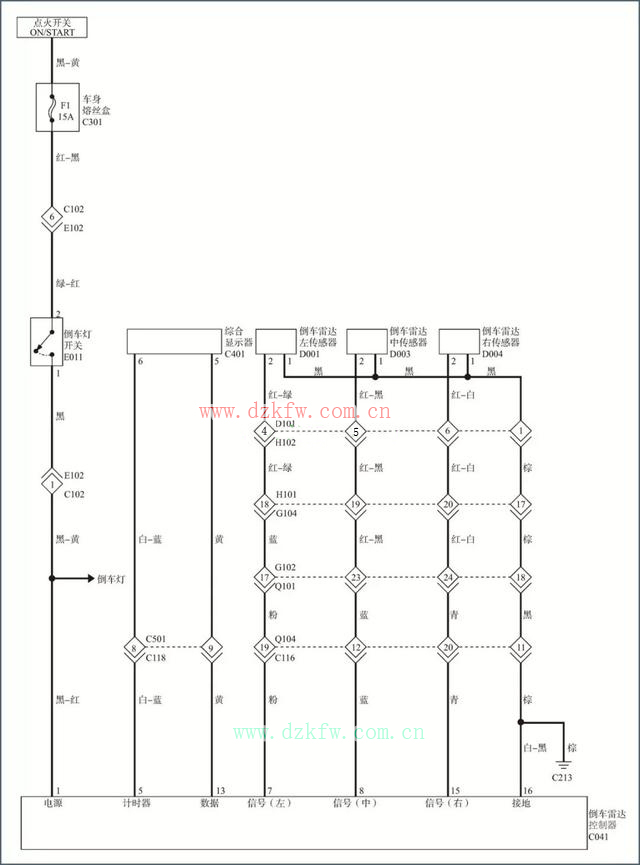
① 電流從倒車?yán)走_(dá)控制器端子7 輸出,到倒車?yán)走_(dá)左傳感器端子2,從倒車?yán)走_(dá)左傳感器端子1 接地,檢測(cè)左側(cè)是否存在障礙物。
② 電流從倒車?yán)走_(dá)控制器端子8 輸出,到倒車?yán)走_(dá)中傳感器端子2,從倒車?yán)走_(dá)中傳感器端子1 接地,檢測(cè)中間是否存在障礙物。
③ 電流從倒車?yán)走_(dá)控制器端子15 輸出,到倒車?yán)走_(dá)右傳感器端子2,從倒車?yán)走_(dá)右傳感器端子1 接地,檢測(cè)右側(cè)是否存在障礙物。
④ 倒車?yán)走_(dá)控制器端子5 和13 連接至綜合顯示器端子6 和5,進(jìn)行數(shù)據(jù)傳送,將倒車?yán)走_(dá)控制器的信息反映到綜合顯示器上。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底