
1、系統(tǒng)元件I/O分配表
根據(jù)分析,可得plc控制系統(tǒng)的輸入輸出點分配

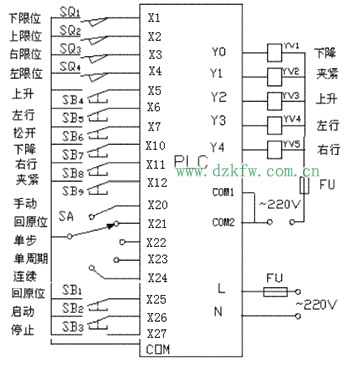
2、繪制PLC硬件接線圖及硬件連接
根據(jù)I/O分配表,可畫出PLC的外部接線示意圖。
二、系統(tǒng)的軟件設(shè)計
運用步進(jìn)指令編寫機械手順序控制的程序比用基本指令更容易、更直觀。在機械手的控制系統(tǒng)中,手動和回原點工作方式用基本指令很容易實現(xiàn),故手動和回原點工作方式用基本指令編寫,自動工作方式用步進(jìn)指令編寫。
機械手控制系統(tǒng)的程序總體結(jié)構(gòu)如圖所示,分為公用程序、自動程序、手動程序和回原點程序等四部分。其中自動程序包括單步、單周期和連續(xù)運行的程序,由于它們的工作順序相同,所以可將它們合編在一起。
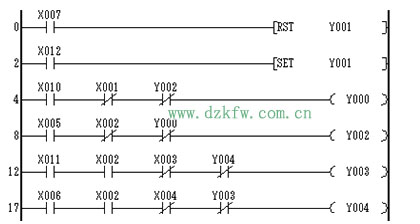
手動程序如圖2所示,用X5~X12對應(yīng)的機械手的上下、左右移和夾鉗松緊的按鈕,按下不同的按鈕,機械手執(zhí)行相應(yīng)的動作。
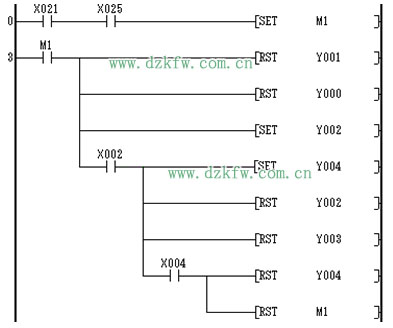
如圖3為回原點程序,在系統(tǒng)處于回原點狀態(tài)時,按下回原點按鈕(X25為ON),機械手松開并上升,當(dāng)上升到上限位,機械手左移直到碰到左限位開關(guān)才停止。
公用程序如圖4所示,當(dāng)執(zhí)行但不工作方式時,X22為ON,特殊輔助繼電器M8040為ON,為禁止轉(zhuǎn)移狀態(tài)。假設(shè)系統(tǒng)處于初始狀態(tài),當(dāng)按下啟動按鈕,系統(tǒng)開始以單步工作方式運行,在完成某一步的動作后必須按一次啟動按鈕,系統(tǒng)才能進(jìn)入下一步。
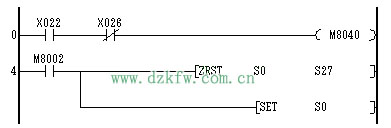
圖3 機械手公用程序
圖4為機械手的自動連續(xù)運行狀態(tài)轉(zhuǎn)移圖。每一狀態(tài)對應(yīng)機械手的一個工序。根據(jù)狀態(tài)轉(zhuǎn)移圖很容易畫出對應(yīng)的步進(jìn)梯形圖。
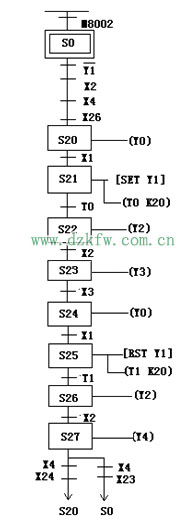
圖 機械手自動單周期/連續(xù)運行的狀態(tài)轉(zhuǎn)移圖
三、系統(tǒng)調(diào)試運行
1、按照圖連接好PLC的輸入和輸出;
2、輸入梯形圖,并將程序下載到PLC。
3、將PLC運行開關(guān)打到RUN,運行程序。
5、操作控制按鈕,觀察運行結(jié)果。
6、分析程序運行結(jié)果,編寫相關(guān)技術(shù)文件。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底